
ü 引用本文
____________________________________________________________________________________________________________________________________
__________________________________________________________________________________
作者简介:张忠源(1993—),男,硕士,主要从事装备理论与装备技术研究,E-mail:121943464@qq.com。
无人机气动弹性与控制综述
Review of UAV Aeroelasticity and Control
气动弹性力学问题在航空航天技术领域的发展初期就已经出现。早在1903年Langley进行他的“空中旅行者”号有动力飞机试飞时就出现了机翼气动弹性发散问题[1],导致了机翼折断。第一次世界大战中,德国战机AlbatrosD-III和FokkerD-VIII也由于气动弹性发散而发生了致命的破坏。20世纪50年代初期,随着飞行器进入超音速范围,新出现的气动弹性问题引起了诸多学者的关注和深入研究,从而使用气动弹性力学开始快速发展,并形成了一门独立的学科。
近年来无人机由于其有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点,发展迅速(见图1)。因此更高性能的无人机开始出现,遇到的气动弹性问题也越来越突出,在进行无人机外形与结构设计时,解决或减少气动弹性带来的负面影响,成为了航空工程师们越来越迫切解决的难题。尤其非线性问题,包括无人机结构非线性和空气动力非线性等,加大了无人机设计时气动弹性方面的难度。气动弹性力学需要考虑空气动力的同时还需考虑材料结构的特性,因此气动弹性力学是一门具有很高难度和复杂度的交叉科学。


图1 太阳能无人机
1 无人机气动弹性与控制研究现状
随着飞行器的飞行速度进入超音速范围,新的气动弹性问题也不断出现,需要解决的气动弹性问题的迫切性也不断增加,加之技术不断发展,例如计算机技术、新材料技术、有限元技术等的出现,推进着气动弹性问题的快速发展。
1.1 无人机静气动弹性研究进展
MJ Patil等[2]在20世纪90年代提出了极限环现象及其各种理论分析和实验研究的方法,给出极限环特性与飞机系统的一些参数之间的近似关系,分析了非稳态空气动弹性设计。随着计算机技术的进一步发展,大型通用软件MSC开始被广泛应用与气动弹性分析,季辰等[3]基于MSC.Nastran有限元软件,对无人机进行了结构动力学建模,并对飞机机翼静气动弹性和颤振特性进行了研究讨论。
随着计算流体力学(CFD)和计算结构力学(CSD)以及计算机硬件技术的发展,周洲团队[4-5]在研究大展弦比机翼的静气动弹性问题上取得了较大成果,提出运用CFD/CSD耦合技术和结构力学方程对大展弦比无人机的静气动弹性问题进行了计算和分析。
涡格法建模容易,计算是效率比较高,气动力计算不会受到工程经验带来的影响,在静气动弹性分析有比较明显的优势,刘燚等[6]采用涡格法对无人机进行气动力建模,并考察了可压缩情况下涡格法载荷的计算精度,涡格法在可压缩情况下载荷计算精度较好且气动力建模优势明显,可用于工程复杂模型的气动力计算。与传统线性静气动弹性计算相比,考虑结构几何非线性及气动力效应的非线性静气动弹性分析更符合真实物理情景,载荷计算更为准确,结构变形结果更为可靠。具体实现过程如图2所示。
1.2 柔性无人机气动弹性研究进展
随着飞行器设计的需要,基于线性理论的三维非定常气动力的计算成为迫切研究的重点,三维非定常气动力的计算比二维计算难度要大得多,R Palacios等[7]运用三维欧拉方程建模,实现了空气动力学和结构力学的详细的三维表示;Z Sotoudeh[8]对高空长航时柔性无人机进行气动弹性分析,开发了一套专门应用于此类无人机的计算程序,可以在较短时间内得到气动弹性分析结果,为柔性无人机设计提供了便捷。D Tang[9]将柔性机翼的气动弹性分析与风洞试验相结合,介绍了一种弹性载荷作用下柔性大展弦比翼型气动弹性模型的理论气动弹性模型。
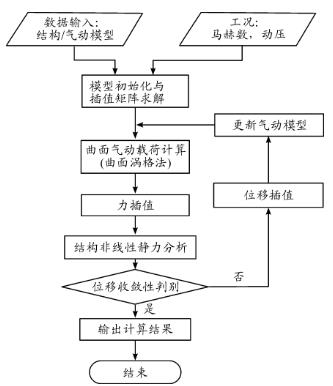

图2 机翼静气动弹性分析流程
太阳能无人机成为目前的研究热点问题,因为其大柔性大展弦比的结构特点,会产生较大的结构变形,同时引起气动载荷的重新分布以及方向的改变,如图3所示,王伟[10-12]团队针对这一热点问题,进行了深入研究,取得了比较大的进展,首先利用软件Fluent计算空气动力,结合推导出的结构变形前后的刚度矩阵和质量矩阵,建立了太阳能大柔性机翼结构动力学模型,提出了改善气动载荷在展向的分布,合理地增加机翼扭转刚度、前移机翼弹性轴、前移机翼截面质心等,均可以有效改善无人机几何大变形引起的不利影响,有利于机翼结构设计。研究工作对大柔性大展弦比太阳能无人机的分析具有一定的参考意义。
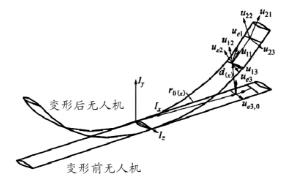

图3 柔性机翼结构变形示意图
1.3 无人机非线性气动弹性研究进展
经典气动弹性理论中假定结构和气动力都是线性的,这样可以较为简单地获得比较准确的结果,但是一般来说结构和空气动力的非线性是普遍存在的,所以研究气动弹性的非线性更能反映真实情况,随着科学技术的发展,对于非线性气动弹性的研究需要也更机迫切。
结构非线性和气动非线性二者满足之一,或者两个都是非线性的,对应的气动弹性问题就是非线性气动弹性问题。MJ Patil等[13-14]提出使用完整飞机模型的气动弹性特性以及整体飞行动态特性的分析中获得结果,由于机翼的灵活性,飞机整体的飞行动态特性也会发生变化,并用严格的非线性气动弹性分析来解释这种行为。进一步将CFD技术应用于气动弹性非线性分析,对无人机表面进行网格划分,如图4所示,发现当靠近表面的计算空气动力学网格聚集时,为提高翼尖和前缘附近的精确度需要额外的增加网格密度。


图4 无人机CFD仿真分析
高空长航时无人机由于机翼扭转的发生,会出现非线性气动力,CC Xie等[15]针对这个问题进行了研究,用平面双点阵方法计算频域内的非定常气动力,忽略偏转翼的弯曲效应。然后,在给定的载荷条件下,对系统进行气弹性稳定性分析。与线性结果相比,翼尖的非线性位移更高。结果表明,由于弦向弯曲具有较大的扭转分量,临界速度较低,阻尼缓慢增长,因此临界非线性颤振为弦向弯曲类型,这在线性分析中并未出现。同样针对高空长航时无人机,密歇根大学C Cesnik[16]团队也进行了深入研究,并搭建了收集几何非线性气动弹性响应的数据实验平台,为飞机提供可在飞行中测量的特定气动弹性特征,例如,耦合的刚性、弹性体不稳定性,阵风期间的大的机翼偏转等。
1.4 无人机气动弹性控制研究进展
气动弹性主动控制是近几十年发展过来的,主要为解决机翼的气动不稳定和疲劳问题的关键技术,现有的解决方法主要分为主动控制和被动控制,主动控制技术是近年来研究的热点。20世纪90年代国内学者邹丛青等[17]开始了飞行器颤振主动控制问题方面控制率的研究,把最优控制理论和颤振分析的状态空间法相结合,并将控制结果结合风洞试验验证,确定了控制率的正确性。北京航空航天大学宗捷等[18]针对某一特殊无人机机型开始了阵风问题和颤振主动控制的研究,应用现代控制理论分别对飞行器系统作开环和闭环分析,设计的控制率具有减缓阵风响应和抑制颤振的双重效果。
多输入/多输出系统的气动弹性主动控制问题成为了气动弹性分析的重要研究方面,杨超[19-20]团队以无人机二元机翼和带两个控制面板的三角机翼为研究对象,将滑模控制理论和LQC理论用于解决气动弹性主动控制问题,从风洞试验结果评估得到,该方法所得的控制率可以应用于工程实践。
随着现代控制科学的发展,王囡囡等[21]提出了基于动柔度法的颤振主动控制研究,该方法无需提前知道机翼的刚度、阻尼等参数,可根据反馈控制率来实现系统的稳定性。控制系统的建立如图5所示,根据极点控制理论来确定系统反馈控制增益,所的系统具有较好的稳定性和鲁棒性。
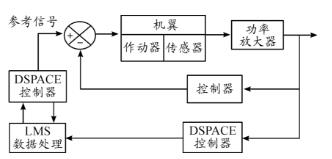

图5 控制系统流程
2 气动弹性问题的分类及其特点
气动弹性力学与控制主要围绕两大问题,一是研究对象为飞行器如导弹、飞机等的气动弹性力学,二是研究对象为桥梁、地面高层建筑为研究对象的气动弹性力学。本文主要围绕针对飞行器尤其是结合无人机发展的气动弹性力学问题。
2.1 静气动弹性问题
静气动弹性问题主要分为两个方面:第一方面问题包括飞机副翼的气动效率及其反效,第二方面问题包括机翼等飞行器结构在气动力作用下扭转发散及载荷在机翼结构上重新分布问题。飞行器机翼和操作面等设计时必须考虑静气动弹性问题,因此针对其的研究具有重大的意义。
静气动弹性的考虑的核心内容是飞行器弹性结构对机体受力分布影响问题。飞行器的速度较小时,机体的弹性形变较小,由于飞行器的速度加快,弹性形变的程度越来越大,由此引起的机翼振动或操作面无法正常工作问题会出现。静气动弹性问题主要研究机体由于弹性形变问题引起的气动载荷分布问题以及两者相互耦合引起的弹性形变的稳定性问题。静气动弹性问题主要特点包括以下两个方面:
1) 飞行器的弹性形变过程是缓慢的,所以由变形速度和加速度引起的气动力和弹性力相比可以不予考虑,在列写气动弹性平衡方程时时间变量不独立出现。
2) 计算静气动弹性问题时所采取的气动力模型为定常气动力模型,所以其和使用非定常气动力模型为研究内容的动气动弹性问题相比要简单许多。
2.2 动气动弹性稳定性问题
关于动气动弹性稳定性研究领域最重要的就是颤振问题,飞行过程中,若飞行器有颤振的情况出现会威胁到其自身安全。飞行器的速度超过颤振临界飞行速度时,颤振就会发生,此时飞行器的振动幅度会增加,造成机体的损伤甚至整个结构的破坏。所以在飞行器设计时要避免颤振的出现,且飞行器的飞行速度不能高于颤振速度,最好保持一定的裕量。
颤振现象之所以会出现,是因为飞行器飞行时空气扰动的存在,当飞行器飞行速度较低时,虽然有一定量的扰动存在,但是飞行器本身系统阻尼可使机体振动幅度逐渐减弱,不会威胁到飞行器的安全;当飞行器速度较高时,空气扰动力很大,致使飞行器本身的系统阻尼无法抵消机体振动,而导致振动幅度增大,威胁到飞行器自身安全;当飞行器到达某一飞行速度时,系统阻尼与空气扰动刚好抵消,机体做等幅振荡,这时飞行器处于动态平衡,这一临界飞行速度也叫颤振速度,对应的振动频率为颤振频率。因为颤振是由于自身运动产生气动力引起的,所以颤振是一种自激振动。
颤振涉及到空气动力和结构力学是一种复杂的物理现象,针对空气动力而言,基本可以分为两种情况,一是流体截面为流线型剖面,例如机翼在攻角较小时,经过机翼的气流无分离和漩涡的出现,这种情况被称为经典颤振;二是流体剖面出现了气流分离或漩涡,这时由于飞行器的攻角过大或流体通过非流线型结构,这种情况成为失速颤振,与空气动力的非线性有关,是非线性颤振的研究领域。
2.3 气动弹性响应问题
前两节讨论的是由于机体自身气动力或加速度造成的自激振动,这一节主要讨论,加入随时间任意变化外力的动力响应问题,此时系统的运动情况受初始条件和外力的影响。
飞行器飞行过程中,会有对结构振动产生影响的外力,且这种外力是随时间变化的,主要有以下几种:
1) 阵风和大气紊流产生的交变力,两者的区别为,阵风孤立阵风时,具有脉冲特性,而大气紊流可以产生是一种不规则、连续的外力;
2) 飞行器投弹、射击和着落时产生的脉冲型交变力;
3) 飞行器机翼和发动机产生的尾流以及跨声速产生的激波引起产生的力。
有几种不同的方法来处理动力响应问题,把飞机作为一个系统,可以把飞机看成是一个刚体,也可以假设成弹性体,或者部分刚体部分弹性体。当把飞行器看成是刚体时,计算过程比较简单,但是忽略了机体由于结构变形带来的影响,尤其是机翼的变形,不仅会引起附加气动力,而且附加气动力反过来会影响机翼的变形,二者会耦合在一起;同时把飞行器当成刚体还会忽略外力引起的弹性结构振动,所以把飞行器当作刚体处理会带来一定误差。处理气动弹性响应问题时,把飞行器当成弹性体处理更为科学,相对当成刚体处理误差更小,更接近于真实结果。
2.4 气动弹性主动控制
气动弹性控制是一门由结构动力学、空气动力学和控制理论相结合的科学,目的是通过引入主动控制量来改善系统的气动弹性特性,与传统控制理论相比,气动弹性控制的难度更高,挑战性更强,因为飞行器的动力特性会随飞行条件的改变而不断改变。
气动弹性控制的研究主要是提高飞行器的气动弹性行为,主要有以下三个方面:
1) 主动颤振控制,这是目前气动弹性控制领域研究最多的问题,目的是提高颤振速度[22],获得更大的飞行颤振包线。主要是通过主动控制实现,即将系统Laplace域中的极点由右半平面移到稳定的左半平面。
2) 突风减缓,通过主动控制来实现外部力干扰响应最小化,从而实现提高飞机的安全性、延长机体寿命、改善乘坐舒适性等目的,这里的突风是指阵风载荷和非定常气动力。
3) 增强机动能力,目的是提高飞行器机动飞行时所需要的升力与力矩的能力,其核心是优化升力面产生的升力和力矩的作用效能。
如图6所示,气动弹性控制系统的结构单元包括:气动弹性系统、传感器、作动器、控制器。d为外部干扰输入,可以是真实信号也可以是方便系统设计的虚拟信号,e为可控输出或性能输出,反映系统的设计目标,u为控制输入,y为测量输出。
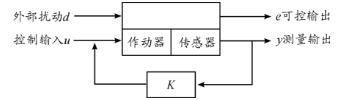

图6 气动弹性主动控制主要构成单元
3 结论
气动弹性技术直接影响着无人机飞行品质,其飞行稳定性、安全性和抗干扰能力均可通过气动弹性分析来加以改善,为了进一步提高飞机性能,还将控制技术引入,通过被控量主动改善空气动力带来的不利影响。
[1] FLOMENHOFT H.Aeroelasticity and dynamic loads-From 1903 to the supersonic era[C]//Structures,Structural Dynamics,and Materials Conference and Exhibit.2006.
[2] PATIL M J,HODGES D H,CESNIK C E S.Limit cycle oscillations in high-aspect-ratio Wings[J].Structures,Structural Dynamics & Materials Conference,1999,15(1):107-132.
[3] 季辰,赵玲.太阳能无人机静气动弹性和颤振分析[C]//第11届全国空气弹性学术交流会论文集.2009.
[4] 范锐军,冯朝辉,周洲.大展弦比无人机的静气弹问题计算及分析[J].力学,2009,30(4):548-554.
[5] 张强,祝小平,周洲,等.高空长航时飞翼布局无人机静气动弹性研究[J].飞行力学,2016,34(1):40-45.
[6] 刘燚,杨澜,谢长川.基于曲面涡格法的柔性飞机静气动弹性分析[J].工程力学,2018,35(2):249-256.
[7] PALACIOS R,CESNIK C S.Nonlinear Aeroelasticity of Flexible Slender Wings in Compressible Flow[J].Aiaa Journal,2005.
[8] SOTOUDEH Z,HODGES D H,CHANG C S.Validation Studies for Aeroelastic Trim and Stability of Highly Flexible Aircraft[J].Journal of Aircraft,2010,47(47):1240-1247.
[9] TANG D,GRASCH A,DOWELL E H.Gust Response for Flexibly Suspended High-Aspect Ratio Wings[J].Aiaa Journal,2010,48(10):2430-2444.
[10] 王伟,周洲,祝小平,等.考虑几何非线性效应的大柔性太阳能 无人机静气动弹性分析[J].西北工业大学学报,2014(4):499-504.
[11] 王伟,周洲,祝小平,等.几何大变形太阳能无人机非线性 气动弹性稳定性研究析[J].西北工业大学学报,2015(1):1-8.
[12] 王伟.太阳能无人机非线性气动弹性及飞行力学研究[D].西安:西北工业大学,2015.
[13] PATIL M J,HODGES D H,CESNIK C E S.Nonlinear Aeroelasticity and Flight Dynamics of High-Altitude Long-Endurance Aircraft[J].Journal of Aircraft,2012,38(1):88-94.
[14] SMITH M,PATIL M,HODGES D.CFD-based analysis of nonlinear aeroelastic behavior of high-aspect ratio wings[J].Structures,Structural Dynamics & Materials Conference,2013.
[15] XIE C C,LENG J Z,YANG C.Geometrical Nonlinear Aeroelastic Stability Analysis of a Composite High-Aspect-Ratio Wing[J].Shock & Vibration,2013,15(3/4):325-333.
[16] CESNIK C,SENATORE P,SU W,et al.X-HALE:A very flexible UAV for nonlinear aeroelastic tests[C]//Aiaa/asme/asce/Ahs/asc Structures,Structural Dynamics & Materials Conference.2006.
[17] 邹丛青,陈桂彬.机翼/外挂颤振主动抑制的控制律研究[J].力学学报,1991,23(3):274-282.
[18] 宗捷,邹丛青,孙庆民.气动弹性系统的阵风减缓与颤振主动抑制[J].飞行力学,1995(4):76-82.
[19] 吴志刚,杨超.主动气动弹性机翼的颤振主动抑制与阵风减缓研究[J].机械强度,2003,25(1):32-35.
[20] 宋晨,吴志刚,杨超.二元机翼滑模变结构控制颤振主动抑制[J].北京航空航天大学学报,2010,36(12):1400-1403.
[21] 王囡囡,侯友夫.基于动柔度法的二元机翼颤振主动控制试验研究[J].组合机床与自动化加工技术,2013(4):27-31.
[22] 张恩阳,宋荣志,冯琨程,等.具有间隙非线性的全动舵系统的颤振分析[J].兵器装备工程学报,2016,37(1):136-141.