
作者简介:颜世刚(1972—),男,硕士研究生,主要从事舰载防空导弹系统、舰炮武器系统试验及仿真研究,E-mail:yanshigang169@sina.com;齐亚风(1979—),男,硕士研究生,主要从事舰炮武器试验与仿真研究。
舰炮建模仿真应用研究
Applied Research on Simulation of Naval Gun Modeling
舰炮机械结构复杂,工艺、材料、加工精度要求高,其设计和加工是否满足要求,决定着舰炮射击的稳定性和可靠性。在实际试验鉴定中,为了检测和考核舰炮是否满足各项指标和设计要求,最有效的手段是实弹射击,但是实弹射击成本高、组织实施难度大。通过舰炮有限元建模仿真,能够辅助分析和评估舰炮的各项性能指标,为试验分析提供有力的理论和数据支撑。基于有限元的舰炮建模仿真,模型的好坏直接影响评估分析的准确性[1-2]。舰炮是一个高度复杂的机械系统,零部件众多,发射过程具有很强的非线性,无论是建模还是仿真均有很大难度[3],本文分析了基于有限元的舰炮仿真建模应用中的一些问题和技巧,结合不同仿真软件对舰炮仿真分析,如HyperMesh和ABAQUS的联合仿真;HyperMesh为前处理软件,能够建立各种复杂结构的有限元模型,指标全面;ABAQUS在解决非线性问题,尤其是解决复杂的接触、碰撞问题等方面有很强的优势[4-5]。
1 有限元建模分析
在有限元分析中,首先是对所要研究的对象进行进行物理结构的分析、归类,选择合适的物理模型进行有限元分析建模。不同物理模型之间的区别在于假定的几何模型不同[6-7]。在研究舰炮有限元建模中,采用的实体单元的形状有六面体和楔形体,壳单元的形状以四边形为主,有少量三角形单元,实际结构要根据各自的物理特征选择相应类型的单元。
实体部件在结构建模中要进行网格化,网格化的精细程度决定了模型的逼真度,同时也影响仿真的速度和精度。当进行结构建模的静态分析时,对于位移分析,模型网格的精细度可以降低,如果求解应力分布,模型网格的精细度要适当提高[8]。
在研究的舰炮有限元建模中,网格尺寸选取的原则是零部件分析的单元基本尺寸5 mm,最小单元尺寸2 mm;系统分析的单元基本尺寸10 mm,最小单元尺寸4 mm;特殊精度要求的区域适当细化。
网格疏密分布是指根据需要在结构的不同部位分布不同的网格密度[9-11]。位移分析、结构固有特性分析、温度场分析,尽量使模型网格均匀分布;在梯度变化较大的结构模型部位(如应力集中区),尽量采用密集网格。舰炮结构建模重点关注的质量指标有雅可比、外观比、翘曲度、偏斜度、内角等。
在舰炮结构建模时,由于其结构复杂,部件繁多,形状各异,因此建模形成的单元类型多样,在互相结合时,不同类型单元的节点自由度和节点配置会出现不一致的情况,为确保不同结构的模型单元在交界面上的位移协调性,壳元与体元的连接采用SHELL-TO-SOLID耦合约束[11],不同类型单元的连接如图1、图2所示。
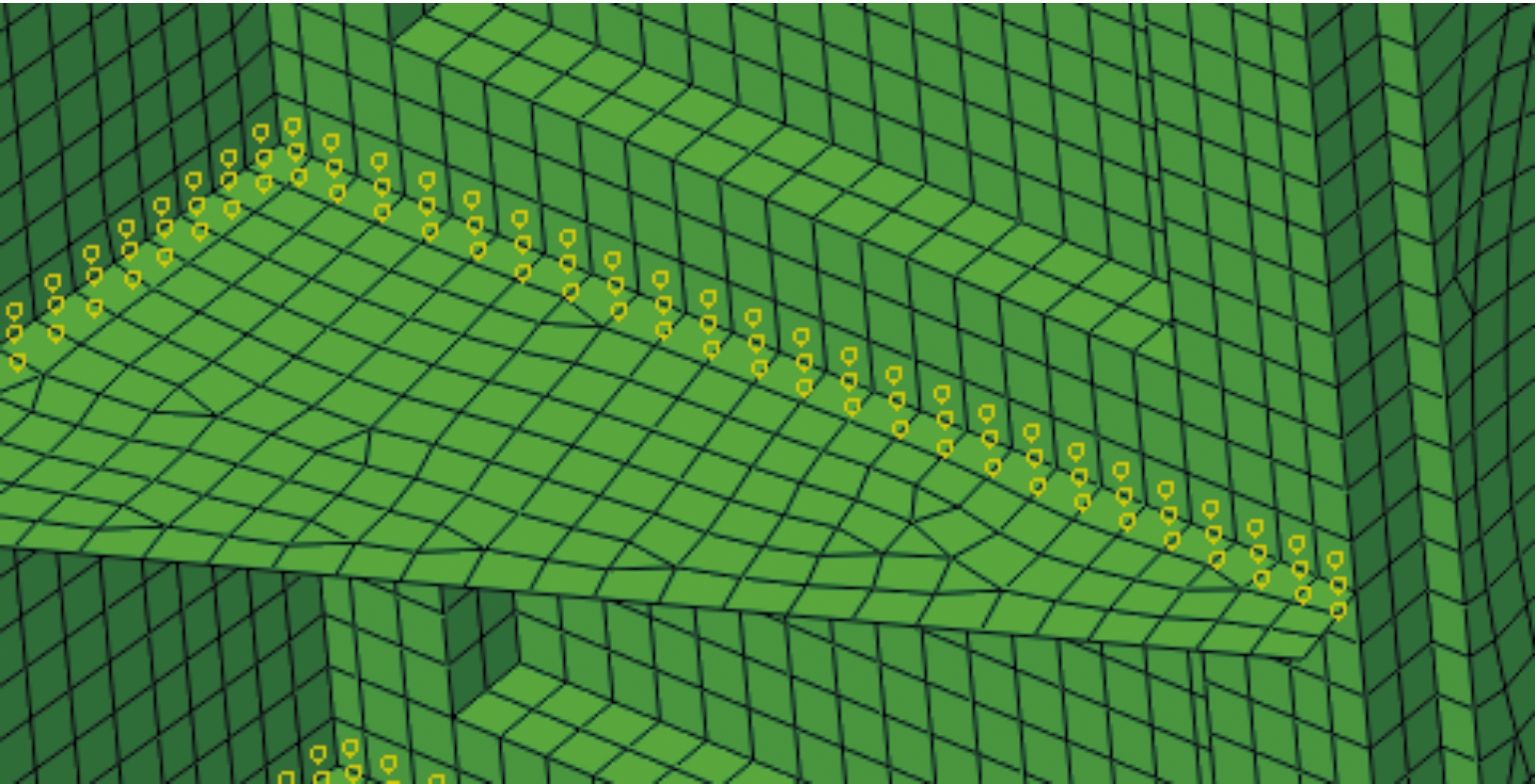
图1 实体单元与壳单元连接
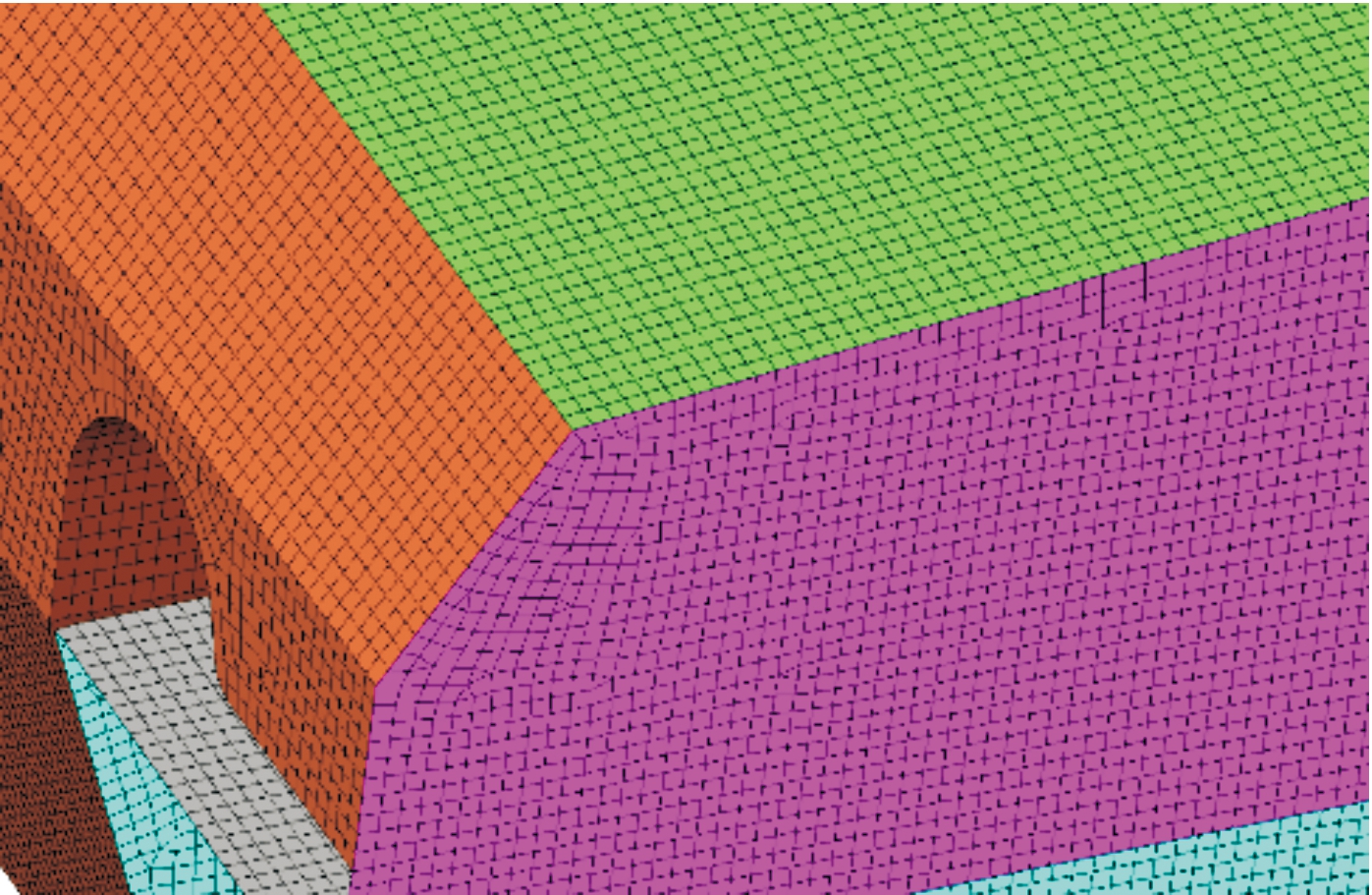
图2 壳单元与壳单元连接
2 舰炮实体模型简化与处理原则
实体建模通常不使用HyperMesh和ABAQUS,舰炮CAD模型是在其他专用三维造型软件中按照其实际尺寸完成,完成后导入HyperMesh和ABAQUS软件中进行有限元建模处理。
有限元分析中有两类坐标系:全局坐标系和局部坐标系。本文中全局坐标系,定义如下:直角坐标系o_xyz的三轴按如下方式定义:x轴沿身管轴线指向炮口方向为正,y轴竖直向上为正方向,z轴以右手定则确定。局部坐标系是用户自己定义的坐标系,目的是为了加载、约束或装配的方便。当载荷或约束的方向与全局坐标系不一致时,应采用局部坐标系。
舰炮CAD模型在专用三维造型软件中完成,而有限元网格划分采用HyperMesh软件,两种软件之间进行数据交流时需要格式转换。实体模型导入到HyperMesh软件中时,首先要注意各模型单元之间的位置不能错乱、关系必须正确;其次各模型单元的几何模型的尺寸必须正确,允许各面有微小缺陷、裂缝和自由边;最后根据刚强度建模的需求,对非受力件做简化处理,对各面有微小缺陷、裂缝和自由边的情况利用HyperMesh的对应工具进行修补[13]。
3 某型舰炮有限元建模仿真示例
舰炮的有限元建模采用模块化思想,这提高了建模的效率,节省了时间和精力,便于后期方案的修改、重组分析和模型修改完善。为了保证导入模型的质量,我们把全炮的实体模型分成几个结构部件单独转入转出,这符合模块化建模的思想。在进行实体部件建模时,将舰炮划分为后坐、摇架、上架和底盘等4个主要部分,每个部分划分成若干小部件单元,每个小部件又由形状各异的零件组成[12]。各个模块既可以单独分析,又可以与其他模块通过定义约束关系组合在一起分析。需要对某些部件或零件结构进行修改时,只需取出该部分所在的模块进行修改,其他的模块不需要作任何变动。
以实际定型的某新型舰炮为研究对象,其需要建模的部件主要分为四部分:后座、摇架、上架、底盘。对舰炮各主要部件的仿真模型建立正确的连接关系,并施加各种载荷,完成其静态模式下应力应变的仿真。
1) 主要部件有限元建模网格化原则
后坐部分主要包括身管、炮尾、炮闩及反后坐装置上的运动部件。炮尾和身管均采用三维实体单元,单元类型以六面体为主,含少量楔形体。
摇架的前衬套、摇架筒、左右耳轴、齿弧等采用三维实体单元,其余部分采用壳单元。
上架两侧板、底板、筋板采用壳单元,耳轴室采用三维实体单元。
底盘上的座圈采用三维实体单元,其余采用壳单元。
2) 机构接触碰撞建模原则
舰炮系统中的接触/碰撞现象具有以下特点:一是受到瞬时冲击载荷;二是相互接触的零部件之间有大位移滑动摩擦,如炮身的后坐运动。舰炮接触/碰撞问题建模的界面如图3、图4所示。
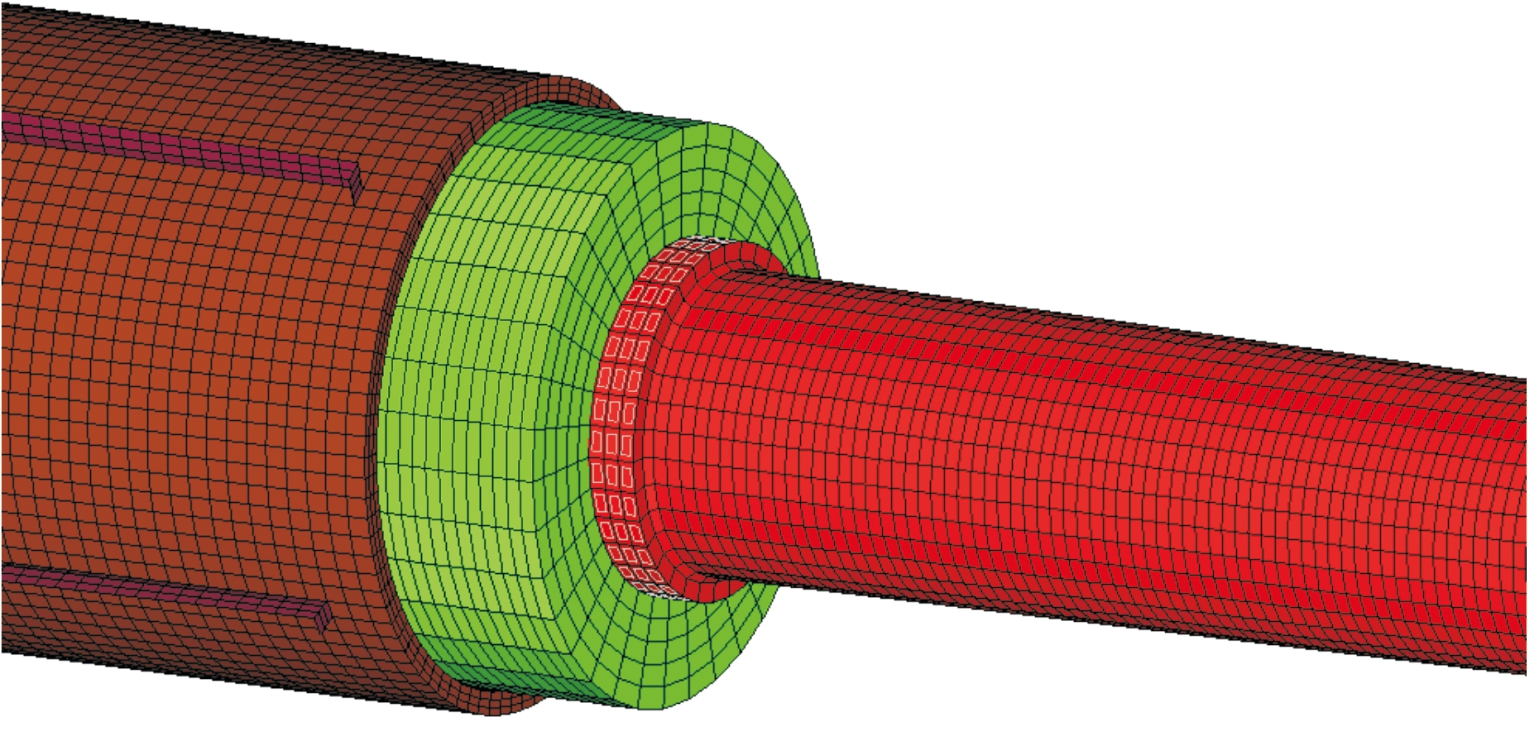
图3 炮身后坐部分接触/碰撞建模界面
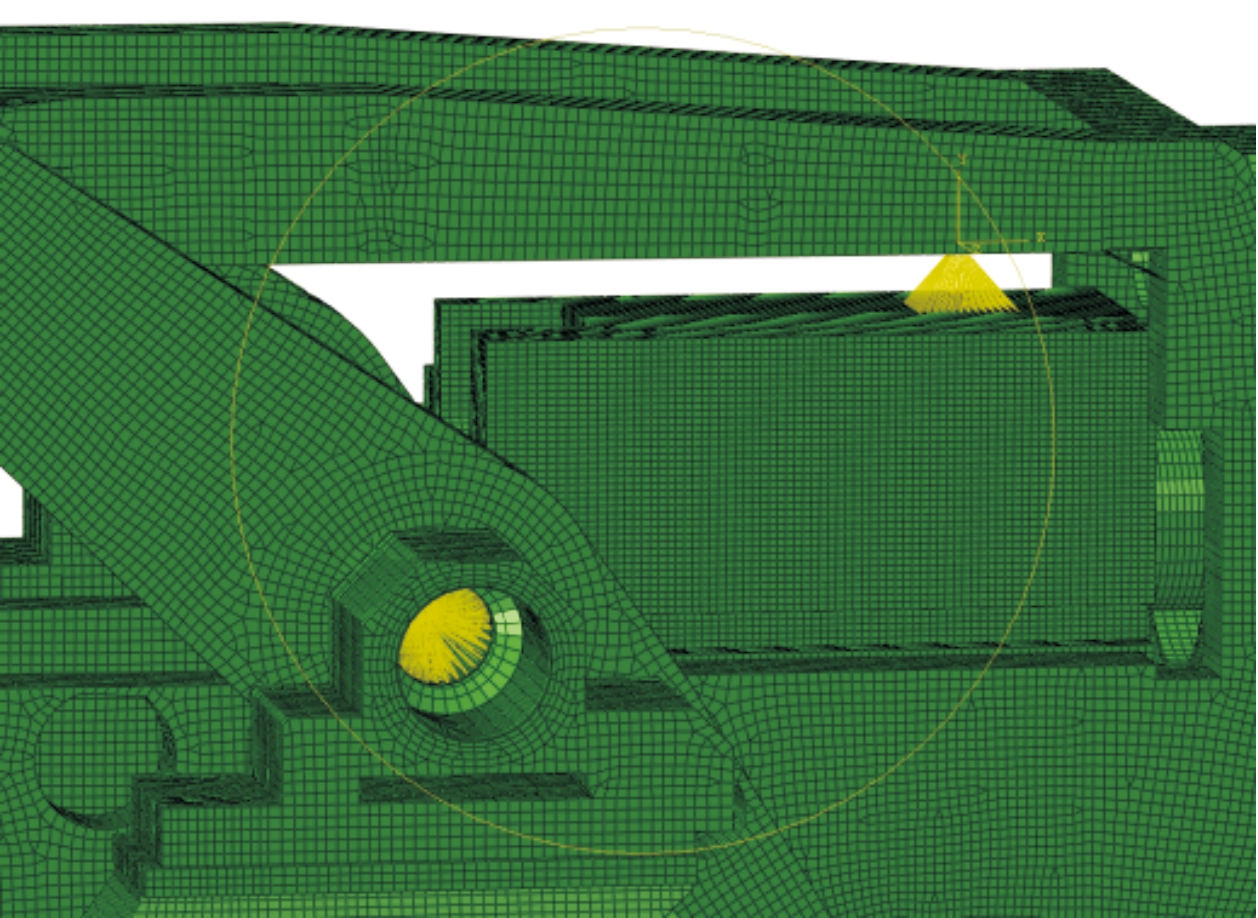
图4 炮尾与摇架滑轨
3) 连接关系及边界条件建模
通过HyperMesh二级菜单栏链接ABAQUS/CAE,在其Interaction功能模块定义接触关系、约束关系、连接关系等[14],其相互作用主要有以下几种:
① Interaction定义模型各部分之间或模型与外部环境之间的力学或热相互作用。
② Constraint定义模型各部分之间的约束关系,如绑定约束、刚体约束等
③ Connector定义模型中的两点之间或模型与地面之间的连接单元,用来模拟固定连接、铰接、恒定速度连接、止动装置、内摩擦、失效条件和锁定装置等。
④ 主菜单Special中的Springs/Dashpots定义模型中的两点之间或模型与地面之间的弹簧和阻尼器。
身管与炮尾之间、炮尾与炮闩、座圈与底盘采用Tie连接(固定连接关系),上架与摇架之间采用旋转运动副连接,上架与底盘通过结构固连。采用连接关系建模如图5~图8所示。
4) 发射载荷建模
舰炮发射载荷一般有膛底压力、复进机力、制退机力、重力等,通过菜单栏链接ABAQUS/CAE,在其Load功能模块进行发射载荷建模。ABAQUS/CAE Load功能模块中的载荷包括集中力、力矩、压力、板壳边上的力或弯矩、面上载荷、管压力、体力、线载荷、重力、螺栓力、位移/转角、速度/角速度、加速度/角加速度、温度、声音压力、孔隙压力等[5,14]。其中,膛底压力的载荷建模如图9所示,复进机力与制退机力施加方式如图10所示。
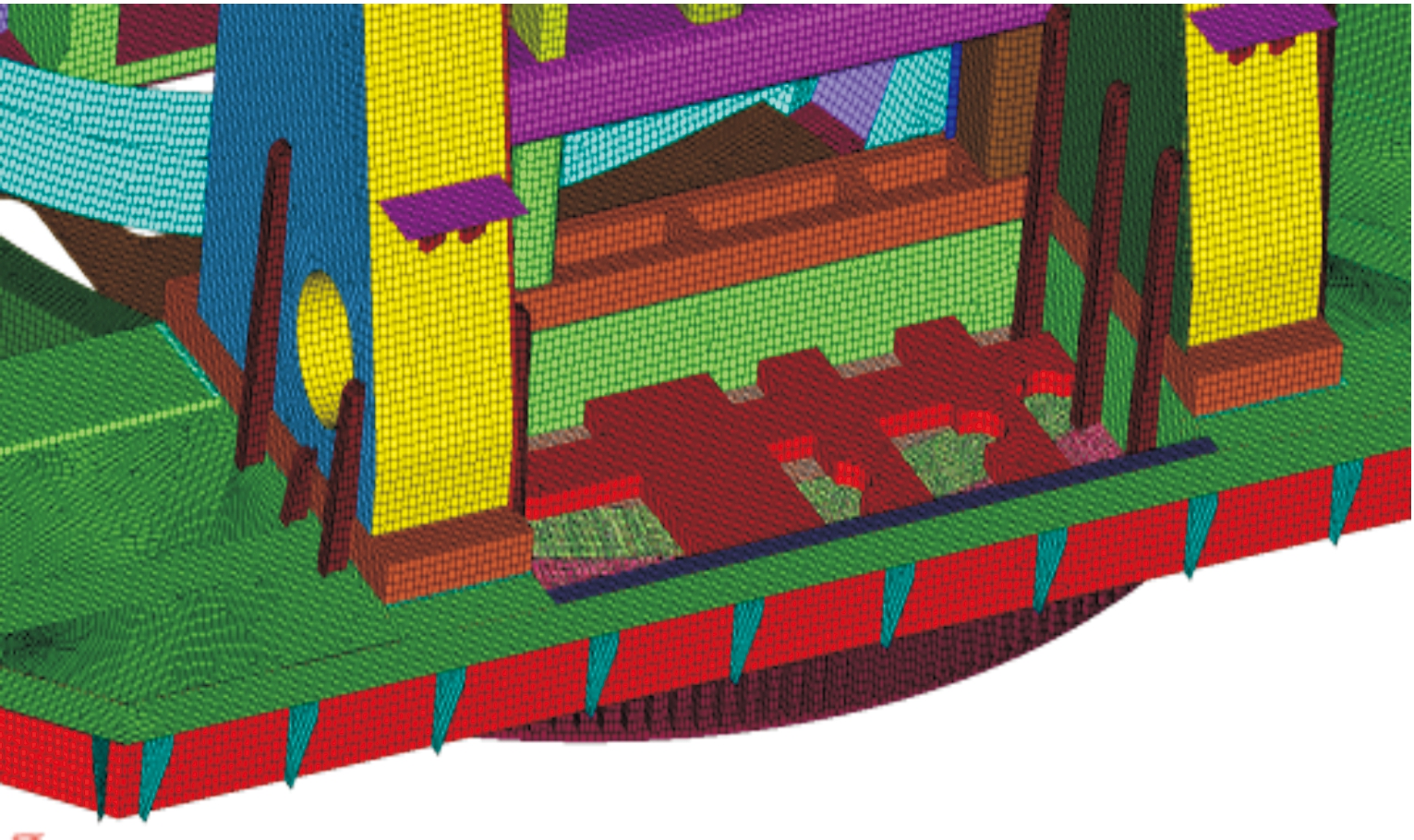
图5 炮闩与炮尾之间的Tie连接
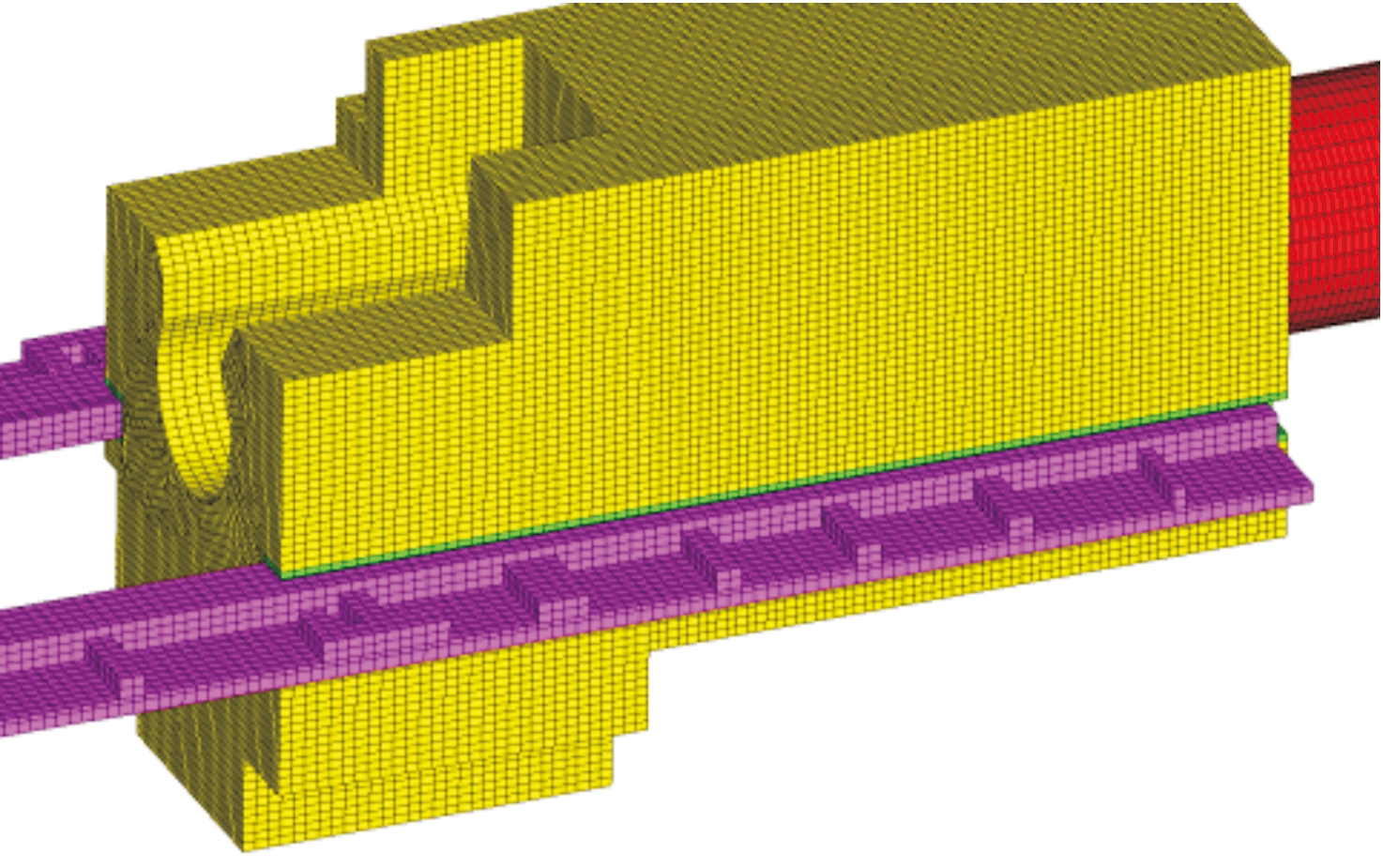
图6 上架与摇架支架的旋转副连接
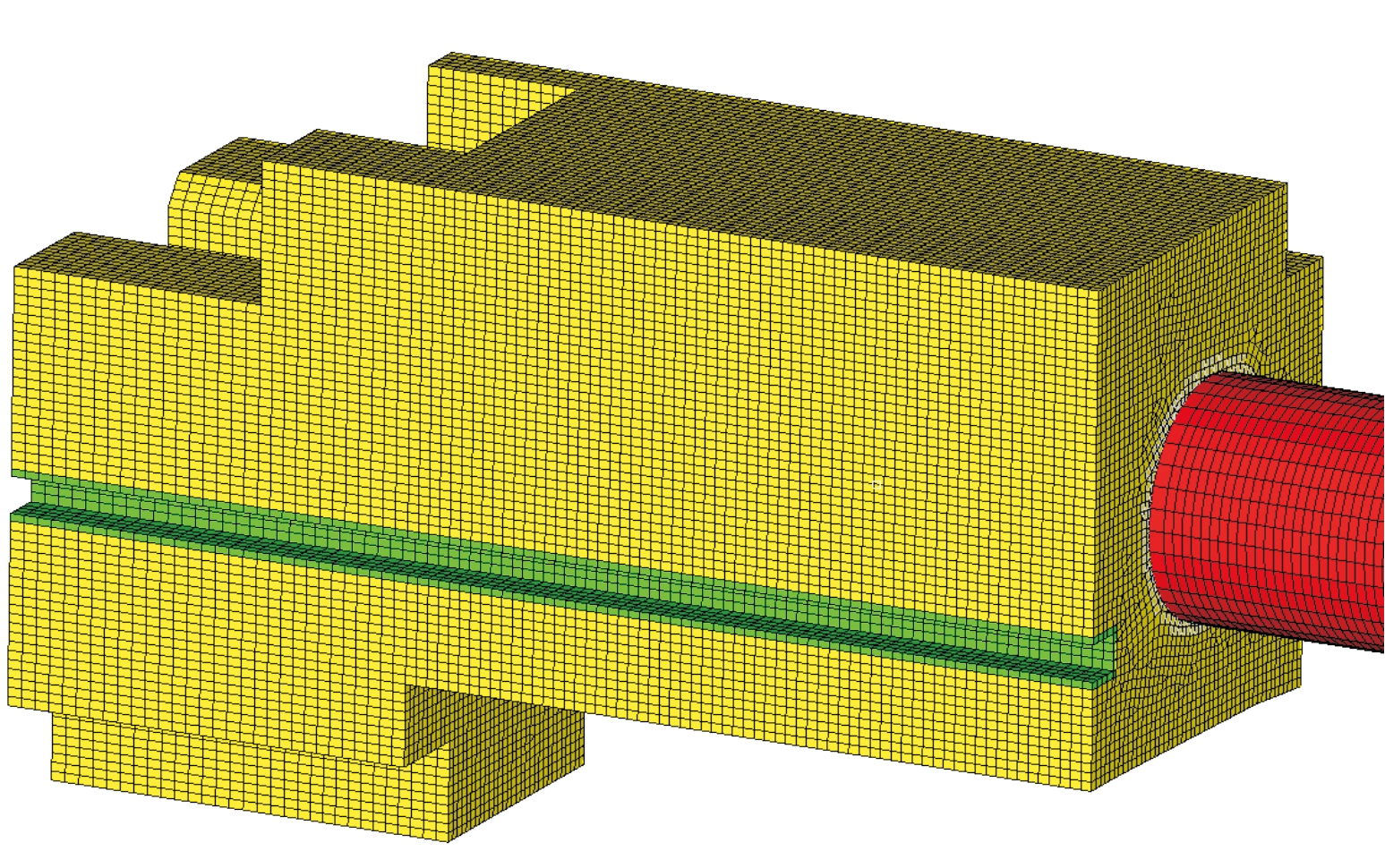
图7 上架与底盘之间的连接
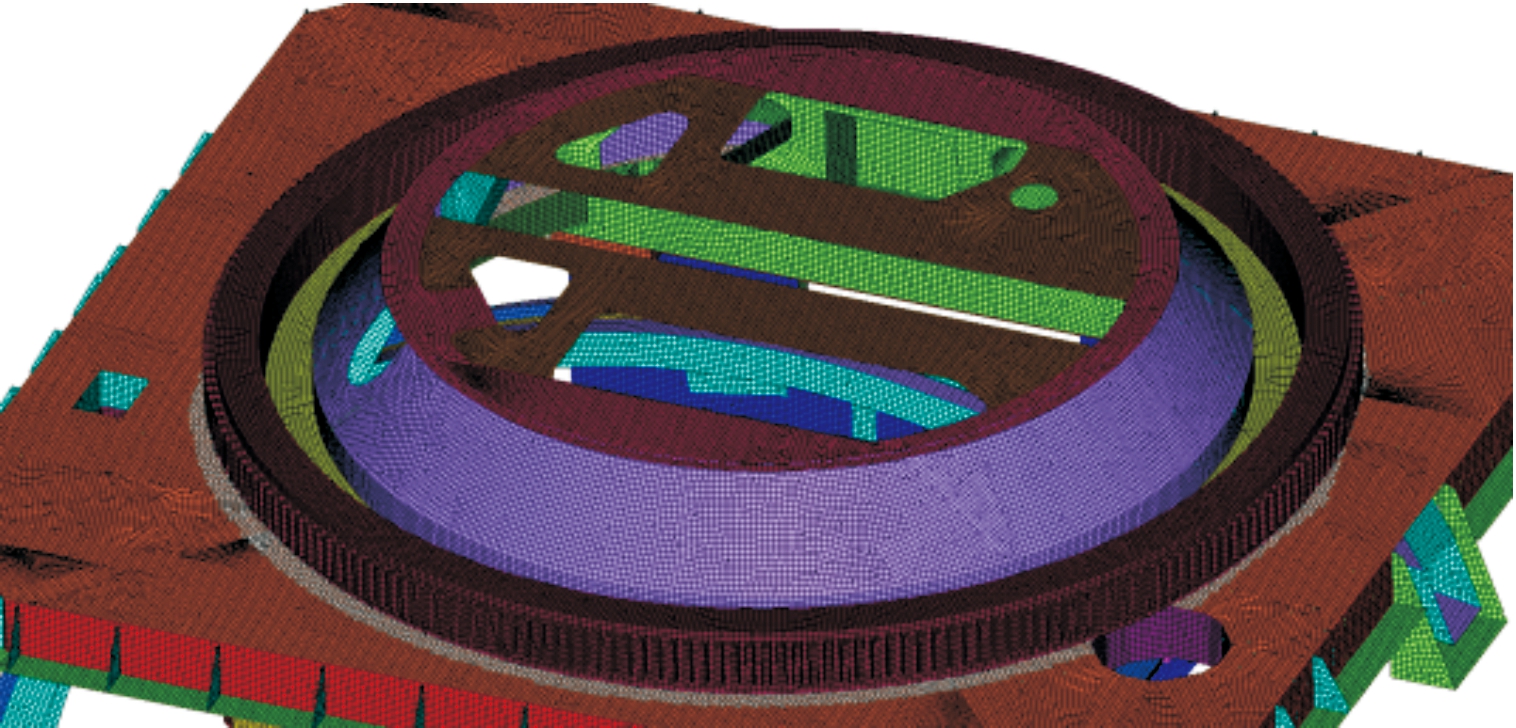
图8 座圈与底盘之间的连接
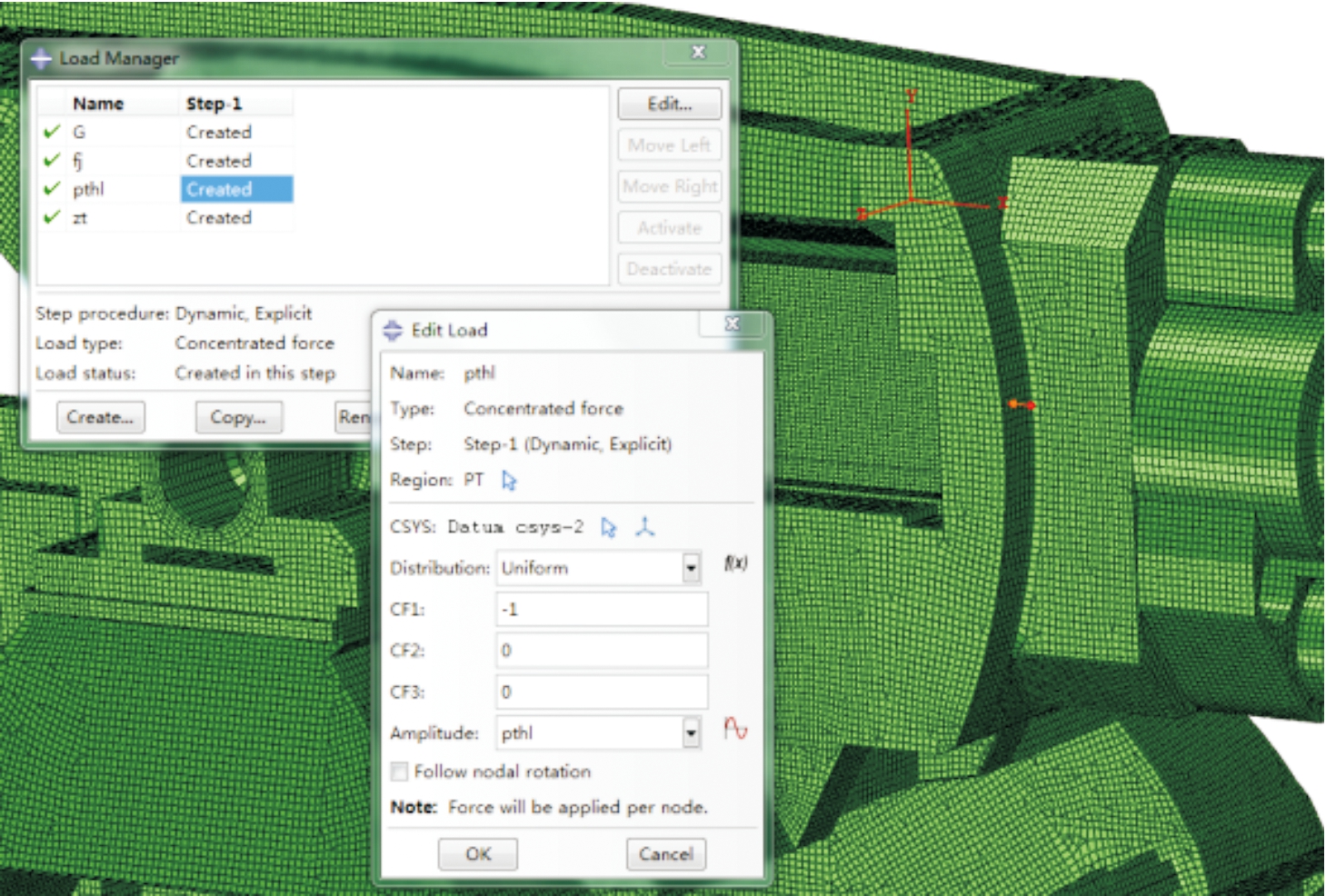
图9 膛底压力加载
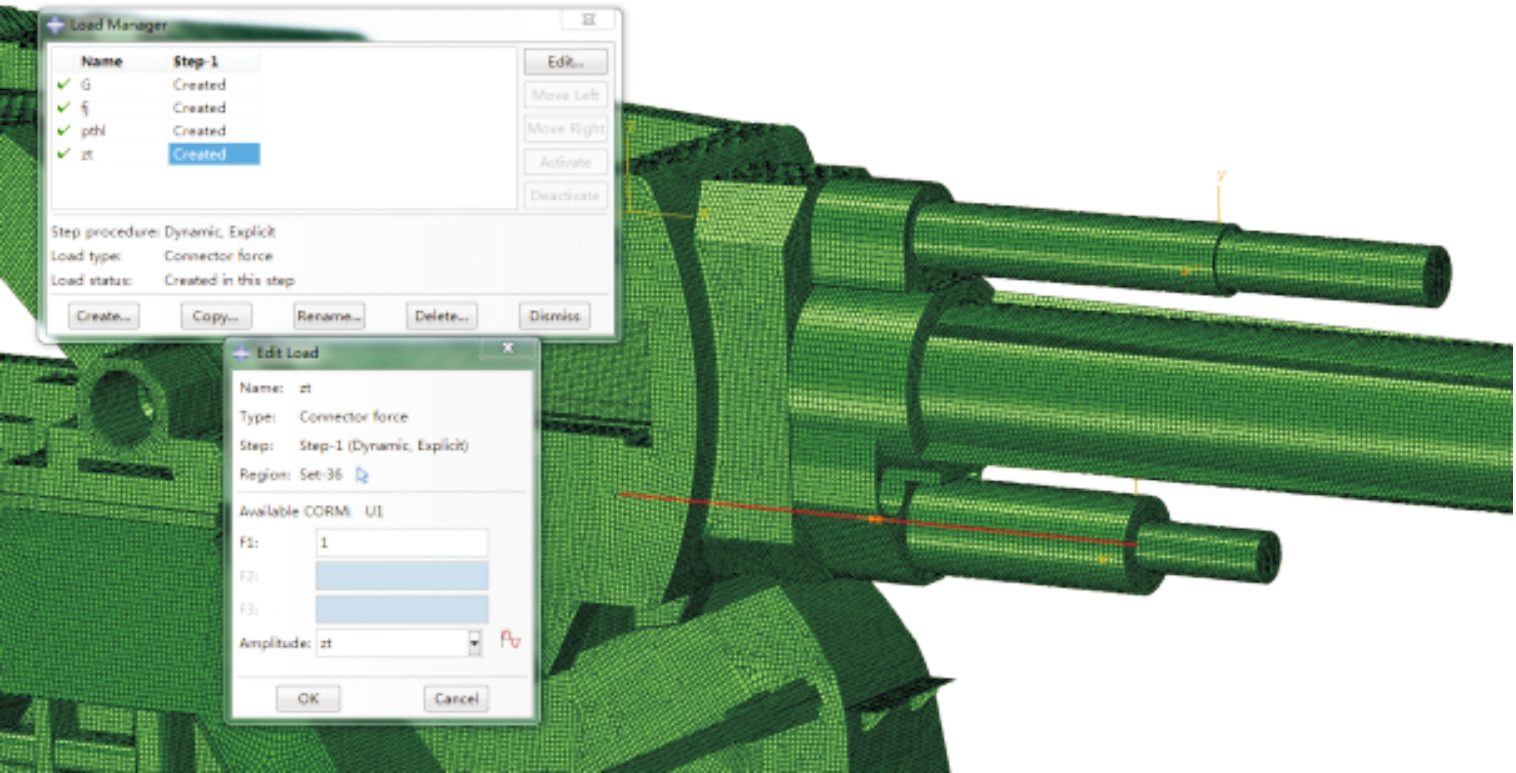
图10 复进机力与制退机力加载
5) 有限元模型检查
舰炮有限元模型的规模一般较大,达到十几万至几十万个单元,有的模型达到上百万个单元,几十个组,上百个连接单元,在建模时难免出现差错。整个模型建好后要重点检查零部件间的网络质量、连接关系、模型与舰炮实体的吻合程度、接触分析、边界条件与配重等。
网格质量:检查自由边、重复单元、雅可比、外观比、翘曲度、偏斜度、内角等。要求无重复单元、自由边、单排单元,焊接边有两排以上单元;按照质量检查文件,无红色单元,黄色单元不超过5%。
连接关系:检查螺栓的连接、焊接、粘结、柔性体与刚体的连接、不同类型单元之间的连接等。要求连接关系正确,重要区域的连接无遗漏,无自由单元、重复单元和自由边,自由度的约束要完全。
边界条件:检查载荷的作用点、大小、方向和载荷曲线,检查约束区域、自由度个数。要求作用点、大小、方向、载荷曲线正确,束条件正确,约束自由度、区域大小合理无冲突。
模型与实体的吻合程度:检查部件位置、装配体位置、部件质量、质心位置、转动惯量、装配体质量、质心、转动惯量等。要求每个部件及整个装配体应处于实际的初始位置,部件及整个装配体的质量、质心位置和转动惯量应与实际情况一致。
接触分析:检查接触类型、接触关系、接触面、穿透性。要求类型合理、属性正确,确保接触面正确、无穿透。
配重:检查位置、质量、质心、转动惯量等。要求配重件连接在刚度较大的部件上,质量、质心、转动惯量等与实体模型匹配。
4 舰炮静态应力应变的仿真
在舰炮静态状态下,选择不同高低角,输入不同的载荷,分析舰炮各个部件的应力应变情况,获取各部件应力和位移变化数据,找出应力位移变化的最大部位,对舰炮测试检查、故障分析排除提供理论数据支持。舰炮高低角可根据其实际工作状态选择多组典型角度,下面选择极限70°高低角作为研究状态。
舰炮静态有限元模型中包括摇架、上架和底盘,不包括后坐部分,后坐部分对摇架的作用通过摇架前、后衬筒对炮身的支持力N1、N2及驻退机力和复进机力来反映。
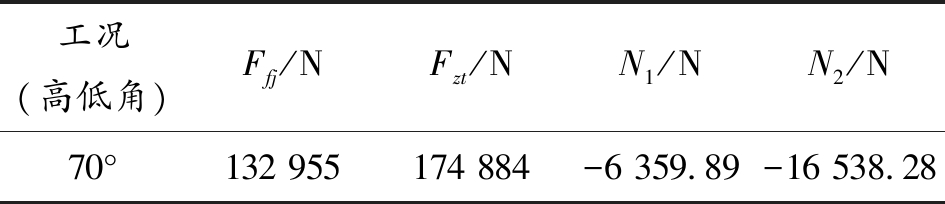
极限工况高低角:70°;施加的载荷:复进机力Ffj、驻退机力Fzt、自身重力G、炮身对摇架前N1、后衬筒的支持力N2,具体数据如表1所示。
约束:上架座圈与对应的连接部件相接触的表面为固定约束。
表1 舰炮静态计算载荷
下面仅通过对摇架的应力应变仿真情况进行分析,其他部件情况仿真分析类似。
摇架强度仿真计算后的应力云图如图11所示。
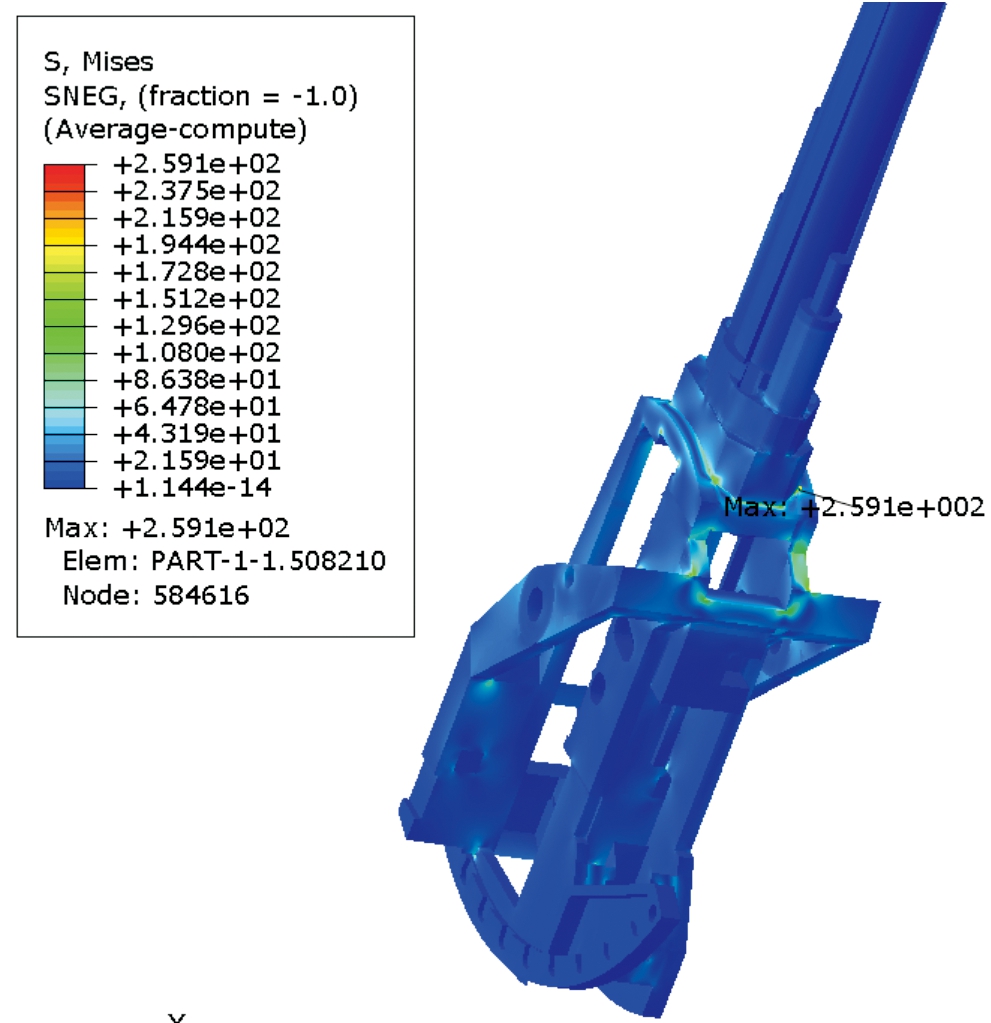
图11 摇架应力云图
从计算结果可以看出摇架最大应力为259.1 MPa,位于摇架筒前端靠近制退机筒后方。
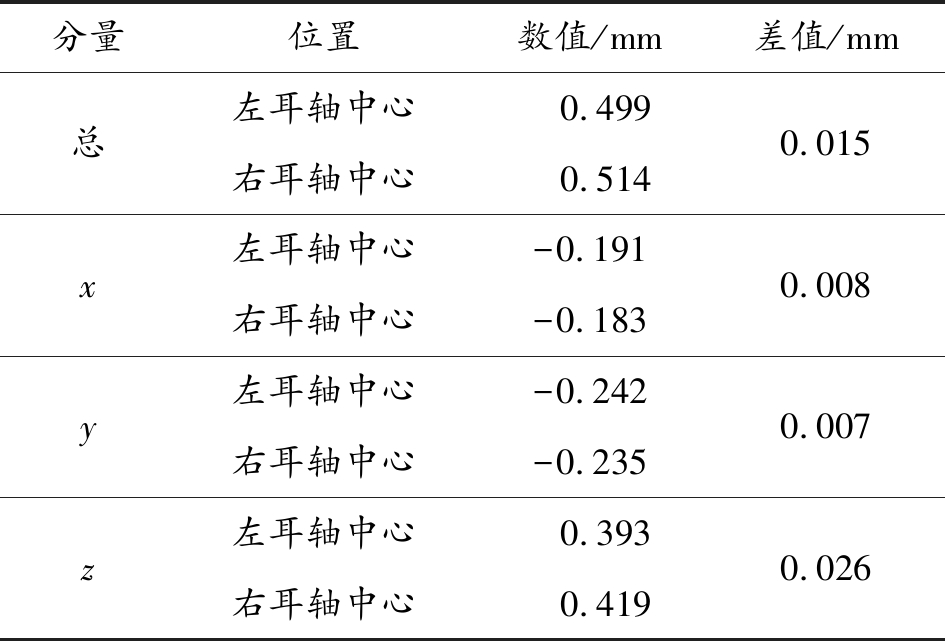
摇架刚度仿真计算位移云图如图12。左右耳轴中心的变形数据如表2所示。
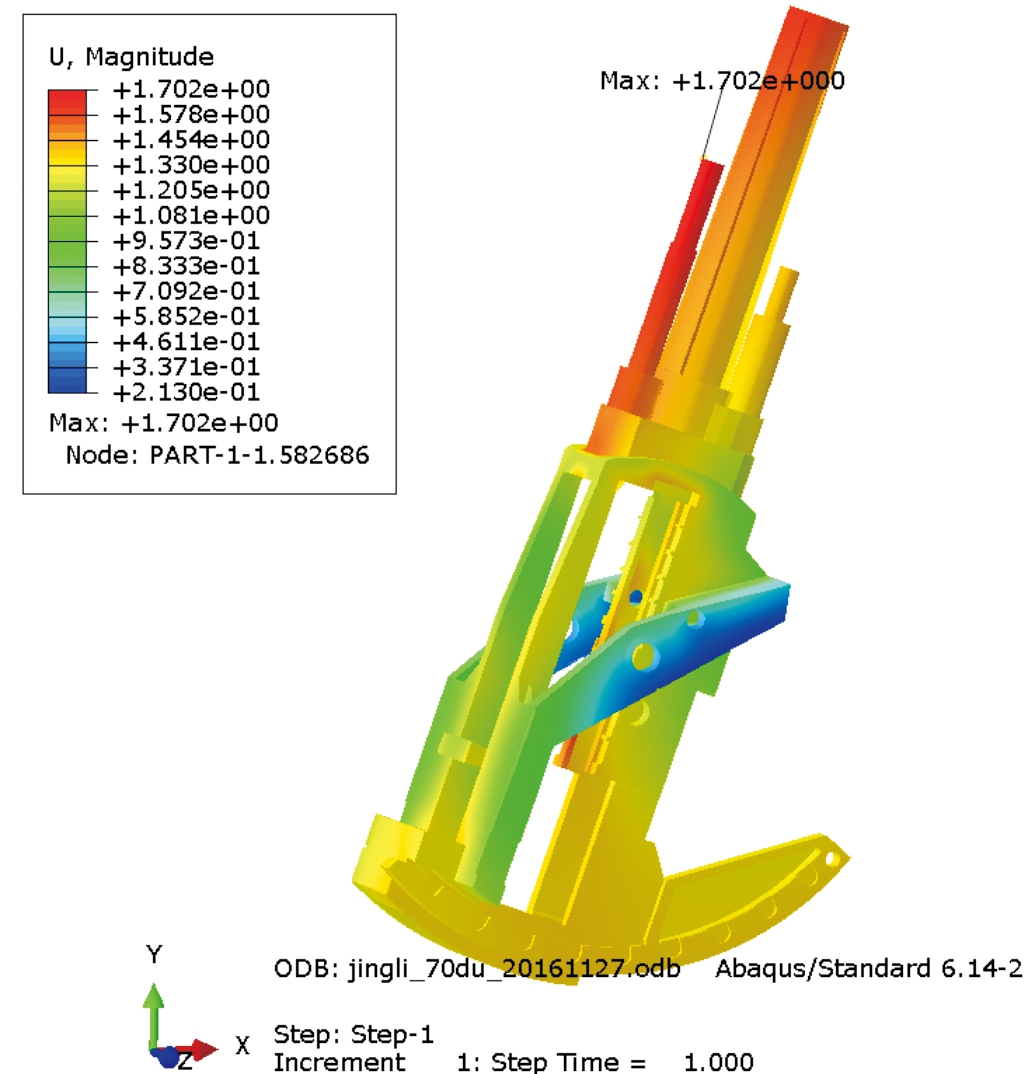
图12 摇架位移云图
从表2可以看出:
1) 左右耳轴中心位移分布为0.499 mm和0.514 mm,变位差为0.015 mm。
2) 左右耳轴中心在x、y、z三个方向的变位差分别为0.008 mm、0.007 mm和0.026 mm。
3) 左右耳轴中心的变位差较小,左右变形基本对称。
从计算结果可以看出,摇架最大位移为1.702 mm,位于摇架复进机前端,左右耳轴中心位移分布为0.499 mm和0.514 mm,变位差为0.015 mm。
通过以上仿真计算能够分析出摇架受到最大应力部位和最大应力值,分析出最大形变部位及其形变量,从而结合舰炮技术指标分析其是否符合研制技术要求,也能为舰炮武器的故障定位、分析排除提供理论支持。
表2 左右耳轴中心变形(70°高低角)
5 结论
1) 更加复杂的舰炮运动学仿真,是分析舰炮射击、开火等运动的应力应变重要手段,其基础也是基于前期的建模和静态仿真。
2) 舰炮建立精细有限元模型是一个复杂的工作,首先根据实际装备建立三维CAD模型,然后进行模型的网格精细划分,最后对发射载荷、接触关系、边界条件、求解策略进行设置。
3) 复进机、制退机是时间、位移、速度的函数,必须在实际工作中对对仿真软件进行二次开发,正确建立载荷模型。
[1] 杜平安.有限元法原理、建模及应用[M].北京:国防工业出版社,2004.
[2] 王兆胜.火炮射击精度分析的模型与应用[M].北京:国防工业出版社,2013.
[3] 杨国来,葛建立,陈强.火炮虚拟样机技术[M].北京:兵器工业出版社,2010.
[4] 于开平,周传月.HyperMesh从入门到精通[M].北京:科学出版社,2005.
[5] 庄茁.ABAQUS有限元软件6.4版本入门指南[M].北京:清华大学出版社,2004.
[6] 尹飞鸿.有限元法基本原理及应用[M].北京:高等教育出版社,2010.
[7] 曾攀.有限元分析及其应用[M].北京:清华大学出版社,2004.
[8] 王勖成.有限单元法[M].4版.北京:清华大学出版社,2008.
[9] 文国治,李正良.结构分析中的有限元法[M].武汉:武汉理工大学出版社,2010.
[10] 刘巨保,罗敏.有限单元法及应用[M].北京:中国电力出版社,2013.
[11] GINER E,SUKUMAR N,TARANCON J E,et al.An Abaqus Implementation of the Extended Finite Element Method[J].Engineering Fracture Mechanics,2009,76(3):347-368.
[12] 张相炎,郑建国,袁人枢.火炮设计理论[M].北京:北京理工大学出版社,2014.
[13] DOBOW J,BELYTSCHKO T.A Finite Element Method for Crack Growth without Remeshing[J].Int J Numer Meth Engng,1999,46:131-150.
[14] 庄茁.ABAQUS非线性有限元分析与实例[M].北京:科学出版社,2005.