
Citation format:ZHANG Xinmiao.Research of Influence of Airfoil Deformation on Performance of Conformal Radar System on Sensor Aircraft[J].Journal of Ordnance Equipment Engineering,2019,40(7):1-4.
作者简介:张新苗(1984—),男,博士,高级工程师,主要从事雷达总体设计研究
doi: 10.11809/bqzbgcxb2019.07.001。
传感器飞机机翼形变对共形雷达系统性能的影响研究
Research of Influence of Airfoil Deformation on Performance of Conformal Radar System on Sensor Aircraft
在现代高技术条件下的“陆、海、空、天、电”五维一体的战争中,无人机的使用越来越广泛,尤其是在最近几次局部战争中表现出色,包括对地侦察监视和打击,作战效能明显[1]。传统的情报、监视、侦察(ISR)任务仍是无人机军事化应用最核心的领域,并且无人机在执行ISR任务时具有自己独特的优势:与有人机相比,无人机规模小、续航时间长、无人员伤亡危险;与卫星相比,无人机时效性、针对性和灵活性更强、分辨率高、预警时间短、成本费用低。
20世纪90年代,随着雷达技术的不断进步,新体制、小型化雷达被安装在无人机上,例如美国“全球鹰”(Global Hawk)、“捕食者”(Predator)、以色列“赫尔姆斯”(Hermes)、“搜索者”(Searcher)等主要无人机上都装载了新型雷达系统,并利用其进行长航时战场侦察监视[2]。
无人机载雷达设计难点主要在于平台本身载荷能力有限,包括安装空间小、供电能力弱、散热要求高等。共形雷达系统采用与无人机机身一体化集成方式进行设计,电讯件与机身结构件功能复用,既能充分利用机身的安装空间,还能最大限度扩大天线阵列口径,以提升雷达系统探测性能。另外,共形天线方向图综合和低副瓣设计难度大,且机翼一体化共形设计时形变会导致方向图产生畸变,对系统性能产生影响,都给传感器飞机的研制带来困难与挑战。
本文针对传感器飞机研制中的机翼一体化共形天线形变对共形雷达系统的性能影响进行分析研究,对天线形变进行建模仿真,针对天线形变前后杂波分布进行了仿真分析,针对机翼形变提出了形变监测及实时补偿的措施,为传感器飞机研制积累了理论基础。
1 共形天线阵列集成设计
固定翼无人机拥有较大的翼展,在机翼上一体化集成共形天线能提供较大的方位向天线口径,方位向探测精度较高;但由于机翼形变大,在机翼部位安装天线阵列对天线的结构设计难度大,参考美国的“传感器飞机”项目,将X波段的天线阵面设计为共形承重结构与机翼集成为一体,如图1(a)所示,机翼内部包含3根梁(前墙、主梁和后梁),由于X波段天线厚度尺寸小,因此可将天线阵面设计在前墙与机翼蒙皮内,将肋的前端去除,利用天线阵面作为前端的结构支撑,并使天线阵面形成一个整体。
前墙的尺寸为2 850 mm×70 mm,假设雷达工作频段为10~18 GHz,水平天线间距按照9.5 mm、垂直间距按照11.5 mm设计,因此天线阵面单元数为水平300×垂直6个。由于机翼安装空间限制,俯仰向进行射频合成。
对于宽带、宽角扫描的阵列天线,可供选择的单元形式有限,而对于无人机平台对单元尺寸、重量、电讯性能、结构型式等方面的限制,给单元的设计带来很大的困难和局限性,在机翼一体化设计时选用金属形式的渐变槽天线单元形式,天线极化为垂直极化,通过对渐变槽天线尺寸进行微调修正,以确保得到良好的驻波和方向图性能[3-5]。
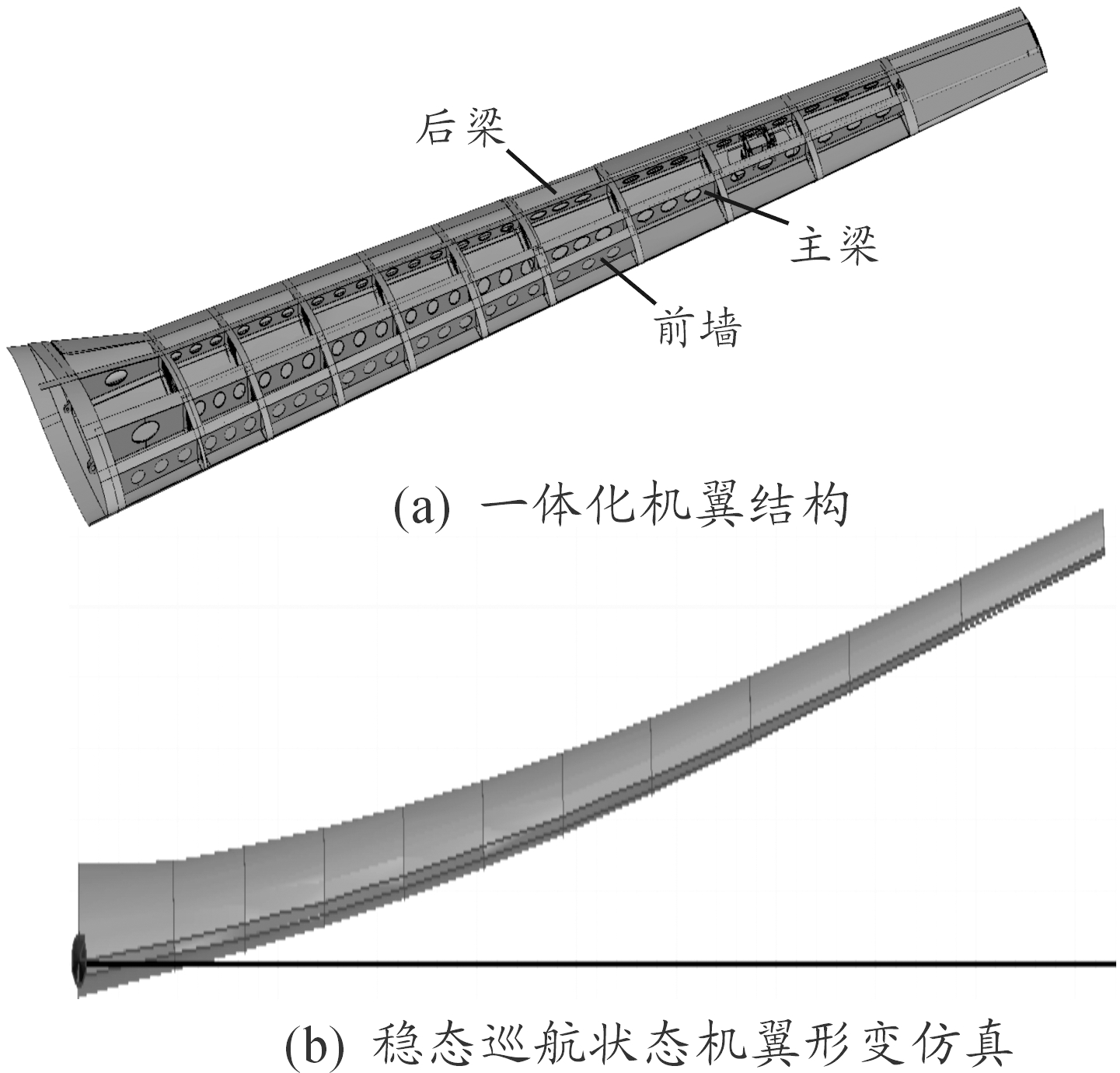
图1 一体化机翼
2 机翼形变对方向图影响分析
通过气动仿真,无人机在正常巡航状态时,机翼的形变模型如图1(b)所示,仿真结果可以看出,机翼末端最大形变达到600 mm,天线阵面形变范围为100~300 mm。
机翼形变时共形天线阵列示意图如图2,其中,Ai为共形阵列中的第i个单元,Ri为第i个单元到目标的距离,ΔRi为第i个单元与A0单元到目标的距离差。
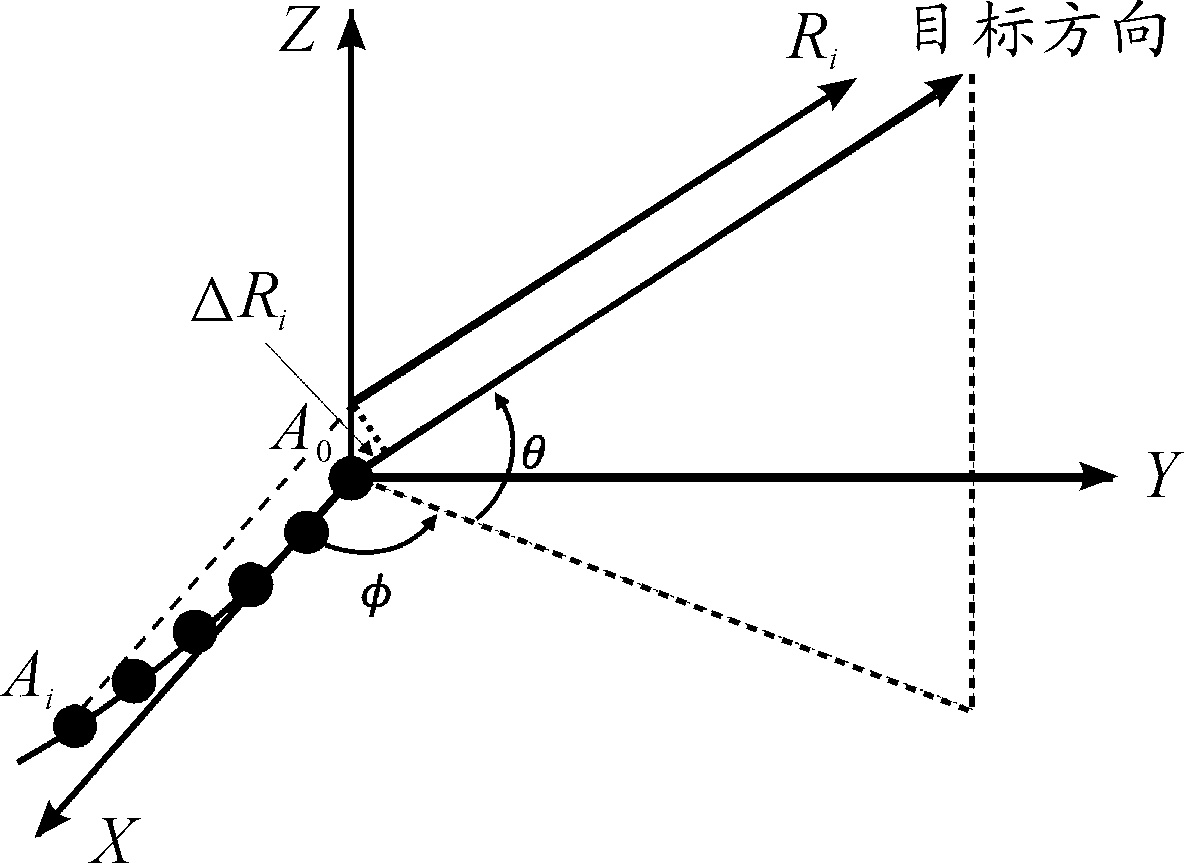
图2 机翼形变时共形天线阵列示意图
共形阵列在目标方向上的合成场强可以表示为
其中, fi(φ,θ)为单元方向性系数,R为参考天线单元到目标的距离,由于目标距离天线阵面远大于天线阵面尺寸,因此可以假定各天线单元到目标的距离相等。
根据相控阵理论,未发生形变时,第i个单元与参考单元A0之间的相位差为为天线单元间距。当阵列发生形变,天线单元间距不再是简单的等间距分布,第i个单元与参考单元A0之间的相位差变化为其中,(xi,yi)为第i个单元空间坐标。目前仅考虑简单的一维形变情况,每个单元在目标方向上的幅度视为不变。
结合机翼形变曲线,利用Matlab对形变阵列进行建模与仿真,可通过理论计算得到形变导致天线方向图的畸变情况,如图3所示。
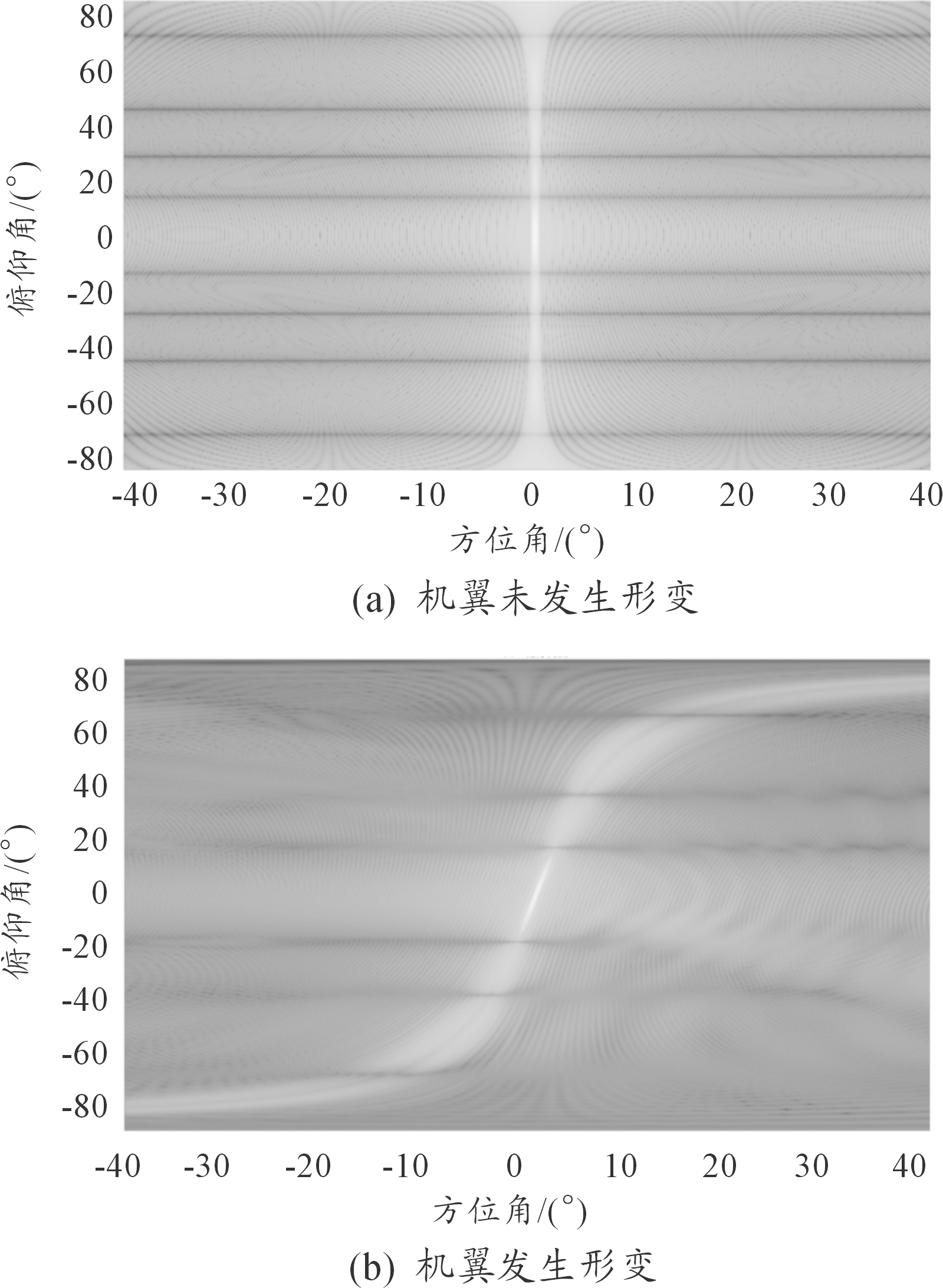
图3 机翼形变导致天线方向图畸变
从仿真结果中可以看出:机翼的形变对方位面法向方向图影响较小,在较大俯仰角时,导致方位波束宽度的展宽和偏移,俯仰角为20°时,方位面波瓣宽度展宽至未发生形变时的2倍,且俯仰角越大,展宽越严重。机翼的形变对俯仰面的影响较大,波束形状发生了畸变。
3 机翼形变对地杂波分布的影响
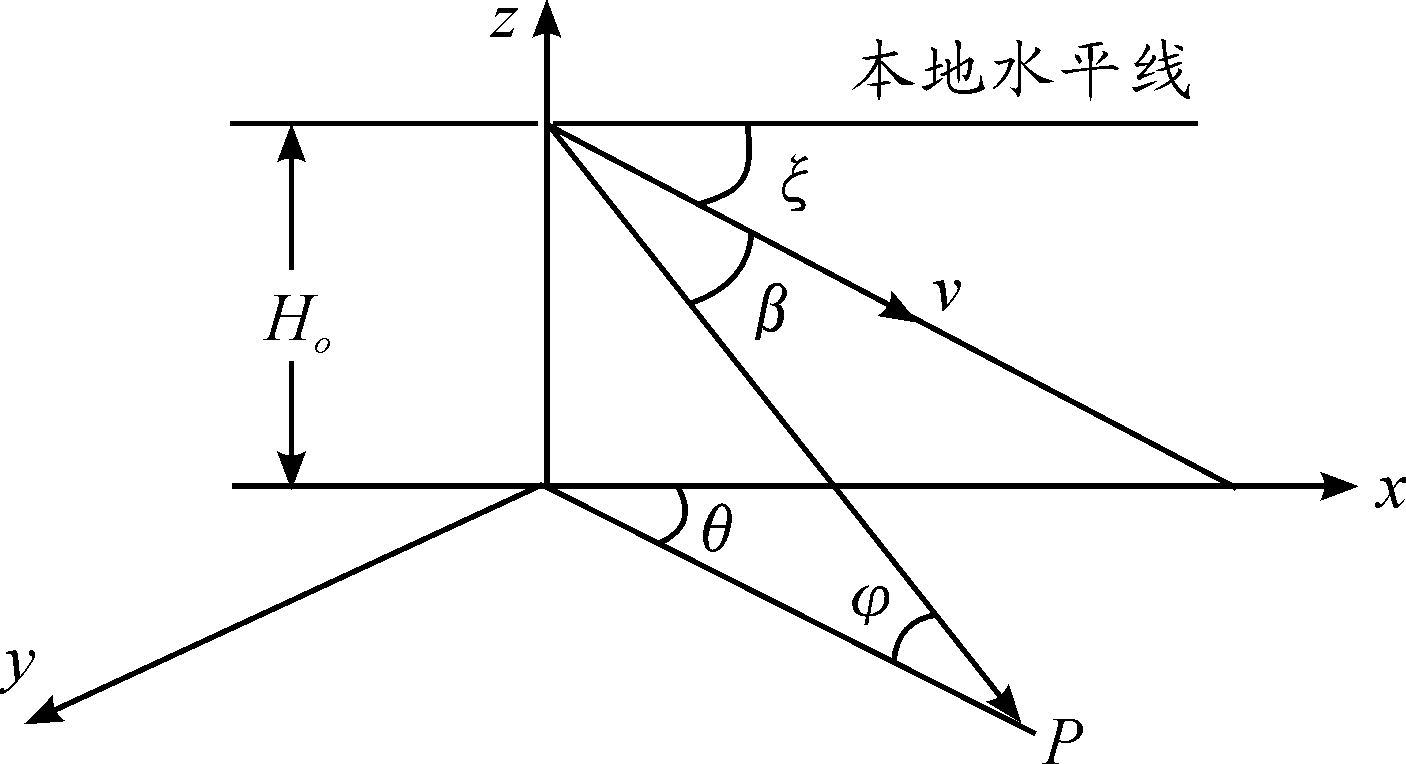
假定雷达发射频率f,脉冲重复频率fr,雷达平台在高度He。地面相对雷达的散射点P,用下视角θ和方位角φ表示,如图4所示。由于存在距离模糊和速度模糊,出现在距离-多普勒检测单元中的整个地面反射杂波σc(Ri,fj)简记为σc(i, j),包含一系列模糊距离-多普勒单元。每个距离-多普勒单元由两个以飞行雷达平台下方地面为中心的恒定距离圆(ΔR)和两个恒定的等速度线(ΔF)所围成,设斜距为R,其杂噪比为[7-8]
其中: Pt为雷达峰值发射功率;λ为雷达发射波长;G(θ,φ)为天线方向性系数;L为系统损失;CB为带宽校正因子,ΔR为距离门宽度。
图4 仿真坐标系(机头方向为X轴,右翼为Y轴)
对于每个杂波单元,其等效散射截面积σc可以用下式表示:
图5为仿真得到的无人机飞行状态下机翼未发生形变和发生形变时杂波分布图;图6为机翼未发生形变和发生形变时回波检测信杂噪比曲线。
从仿真结果中可以看出:由于机翼形变导致天线方向图发生畸变,杂波分布从而发生改变,系统接收到的回波信杂噪比近区下降超过20 dB,远区下降约10 dB,机翼形变导致系统探测性能下降。
图5 杂波分布
4 机翼形变感知与补偿技术
通过建模和仿真,得到了机翼形变时天线阵列的方向图及导致系统探测时杂波分布变化,可以看出:机翼形变会影响一体化雷达载荷的性能,因此在工程应用时,需要实时监测机翼形变和解算每个天线单元的空间坐标(xi,yi),波束形成时考虑天线单元空间位置,并对各单元到目标的相位差进行补偿,才能正确得到共形阵列的方向图。通过理论分析,每个天线单元需要补偿相位差为
针对机翼形变感知需求,可以采用光纤光栅技术对机翼的形变进行实时感知,并对机翼形变导致的空间相位差实施动态监测,将光纤布拉格光栅表贴在机翼上,并在各天线单元附件布置传感器,光纤布拉格光栅对于轴向拉伸应变非常敏感,可以建立应变-变形模型,通过精确测量应变量,采用拟合手段实时反演得到各天线单元的空间坐标(xi,yi),并据此对相控阵系统进行相位补偿,得到正确的天线方向图。
与常规的傅立叶变换法、最小二乘法法等信息处理技术相比,形变监测技术可以直接获取阵列中单元的空间位置变化绝对值,无需通过优化算法进行不断迭代收敛计算,实时性更强,更加适合在工程应用中实现。
图6 信杂噪比曲线
5 结论
本文针对固定翼无人机平台机翼一体化共形天线阵列进行了建模研究,分析了由机翼形变导致的天线阵列空间方向图的变化,根据仿真结果可以看出:机翼的形变对方位面法向波瓣影响不大,大俯仰角处方位波束宽度展宽较大,俯仰角为20°时,方位面波瓣宽度展宽至未发生形变时的2倍,且俯仰角越大,展宽越严重;机翼的形变对俯仰面的影响较大,波束形状发生了畸变。天线方向图的畸变导致系统接收回波的杂波分布发生改变,系统接收到的回波信杂噪比近区下降超过20 dB,远区下降约10 dB,机翼形变导致系统探测性能下降。
本文提出了机翼形变实时感知与动态补偿技术,通过测量机翼形变量,可以对空间相位差进行动态补偿,从而消除机翼形变对雷达性能的影响。本文相关研究成果可以为无人传感器飞机系统的研制提供理论支持,尚需要在工程实际应用中进行实施验证。
[1] 邓大松.无人机雷达载荷发展浅析[J].飞航导弹,2010(12):76-79.
[2] 刘亮,吉波.无人机载雷达现状及发展趋势[J].现代导航,2014(3):227-230.
[3] 许群,王云香,刘少斌,等.飞行器共形天线技术综述[J].现代雷达,2015,37(5):50-54.
[4] 朱松.共形天线的发展及其电子战应用[J].中国电子科学研究院学报,2007(2):562-567.
[5] LARS J,PATRIK P.Conformal Array Antenna Theory and Design[M].Hoboken,New Jersey:IEEE Press,2006.
[6] 张光义.共形相控阵天线的应用与关键技术[J].中国电子科学研究院学报,2010(5):331-336.
[7] 贲德,韦传安,林幼权.机载雷达技术[M].北京:电子工业出版社,2006.
[8] 严韬,谢文冲,王永良.机载MIMO雷达杂波建模及杂波特性分析[J].雷达科学与技术,2010(8):289-295.
[9] 张光义.相控阵雷达原理[M].北京:国防工业出版社,2009.